Payload design explained



TOTAL SOLAR ECLIPSE 2024

TOTAL SOLAR ECLIPSE 2024







The payload is housed in a hexagonal enclosure 195 cm in height and 37cm in width. The entire payload weighs about 7 kg. It contains several mechanical and electronic components needed to ensure the safe flight of the payload, a transponder for air-traffic identification, RF devices for air-ground communication, GPS, pressure/temperature sensor and multiple computers for image gathering, control and storage. It contains a total of 7 cameras, some of which are shown in Figure 1.
Another view of the payload is shown in Figure 2 as viewed from the side.
Another view of the payload is shown in Figure 2 as viewed from the side.
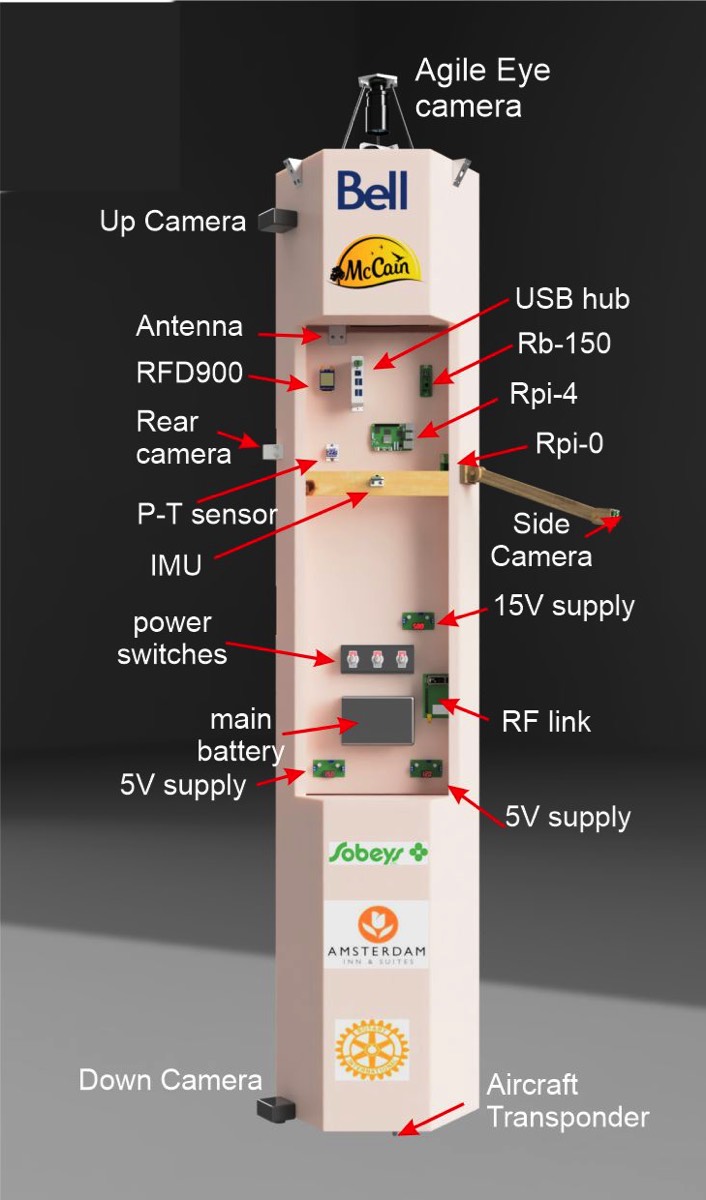
Figure 1
Labelled view of payload enclosure

Figure 2
Side view of payload enclosure
On the top of the payload sits the Agile Eye camera which directs a small mirror to reflect the sun’s image into a lens focused on a Raspberry Pi high resolution camera sensor (Figure 3). The mirror orientation is achieved by taking continuous assessment of the payload orientation and heading from an Inertial Measurement Unit. This data is then used to position the mirror to achieve alignment with the sun throughout the flight through software from an OpenRB150 MCU driving two servos.
The solar tracking mechanism which we refer to as the “Agile Eye” is based in part on the work of Clément M. Gosselin and Francois Caron who were Professors at Université Laval, Québec, Canada. Their device was first documented in 1999 in the now expired US Patent 5,966,991.
The solar tracking mechanism which we refer to as the “Agile Eye” is based in part on the work of Clément M. Gosselin and Francois Caron who were Professors at Université Laval, Québec, Canada. Their device was first documented in 1999 in the now expired US Patent 5,966,991.
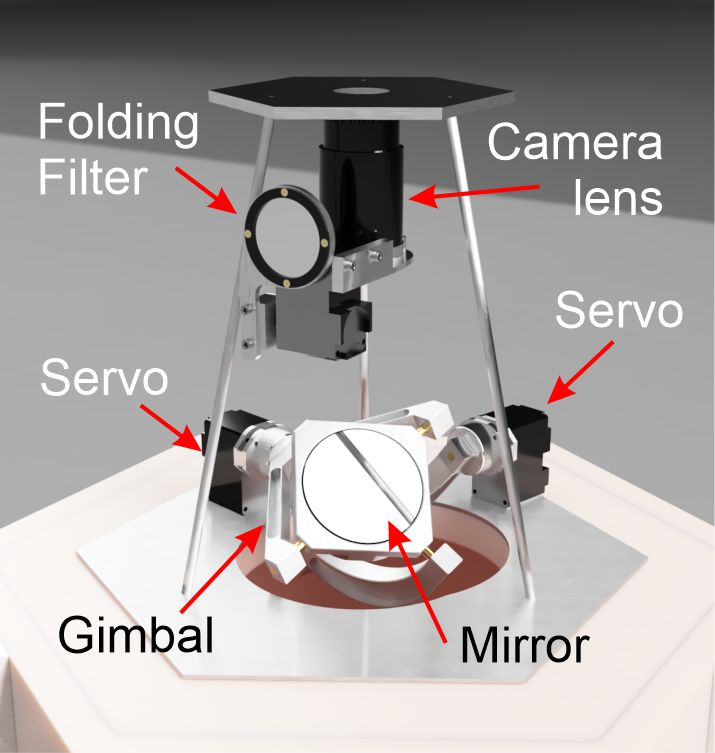
Figure 3
Detailed view of the Agile Eye
Top
- ../../resources/astronomy-1867616_1280.jpg